Autonomous Memories ⠾

Categories
Lidar
Automotive
Data Visualisation
Human memory is emotional, selective, unreliable. We remember how something felt, not what we measured.
An autonomous vehicle remembers differently, every object classified, every risk weighted, every moment reduced to data it can act on. Nothing is forgotten. Nothing is felt.
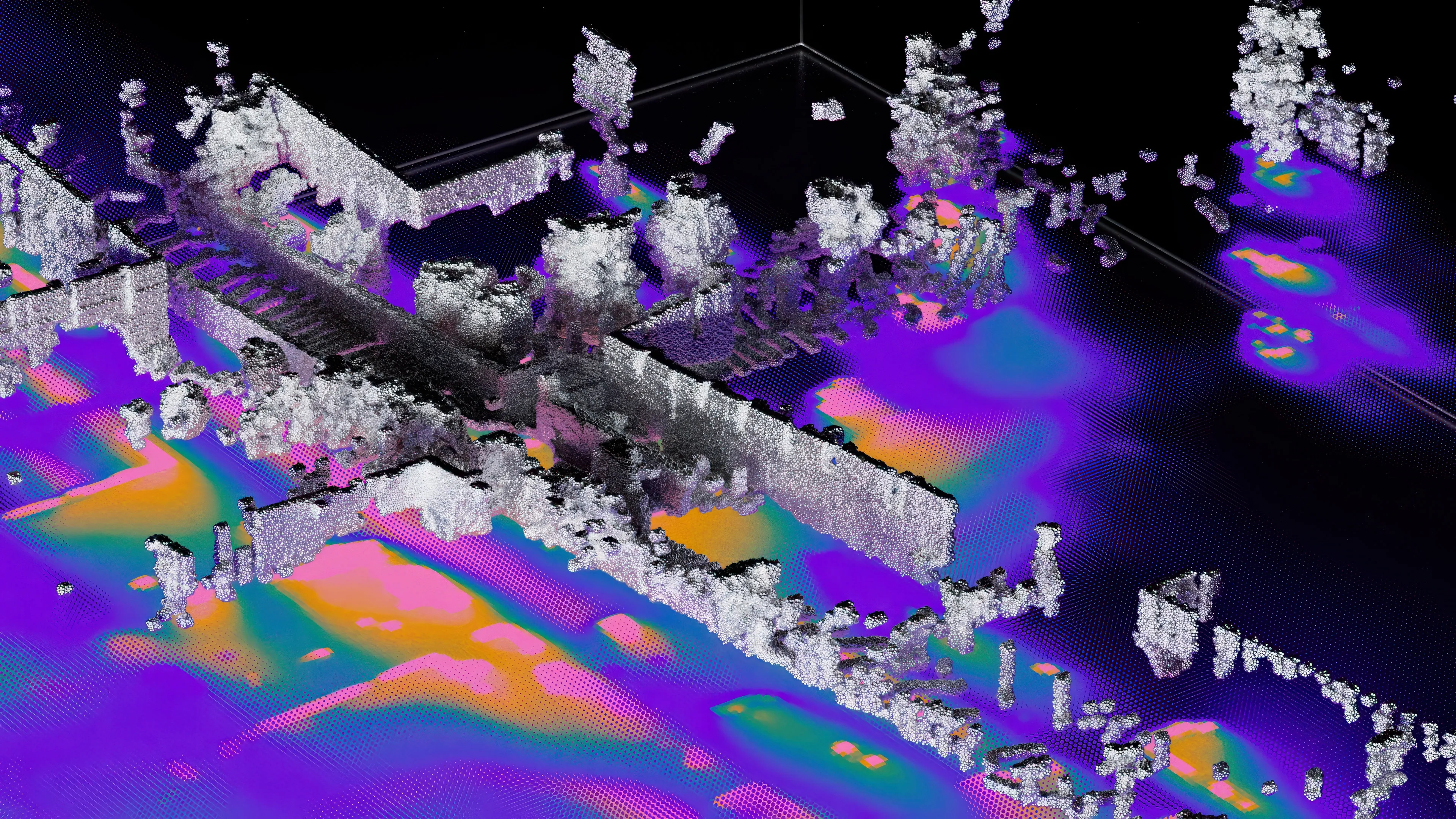
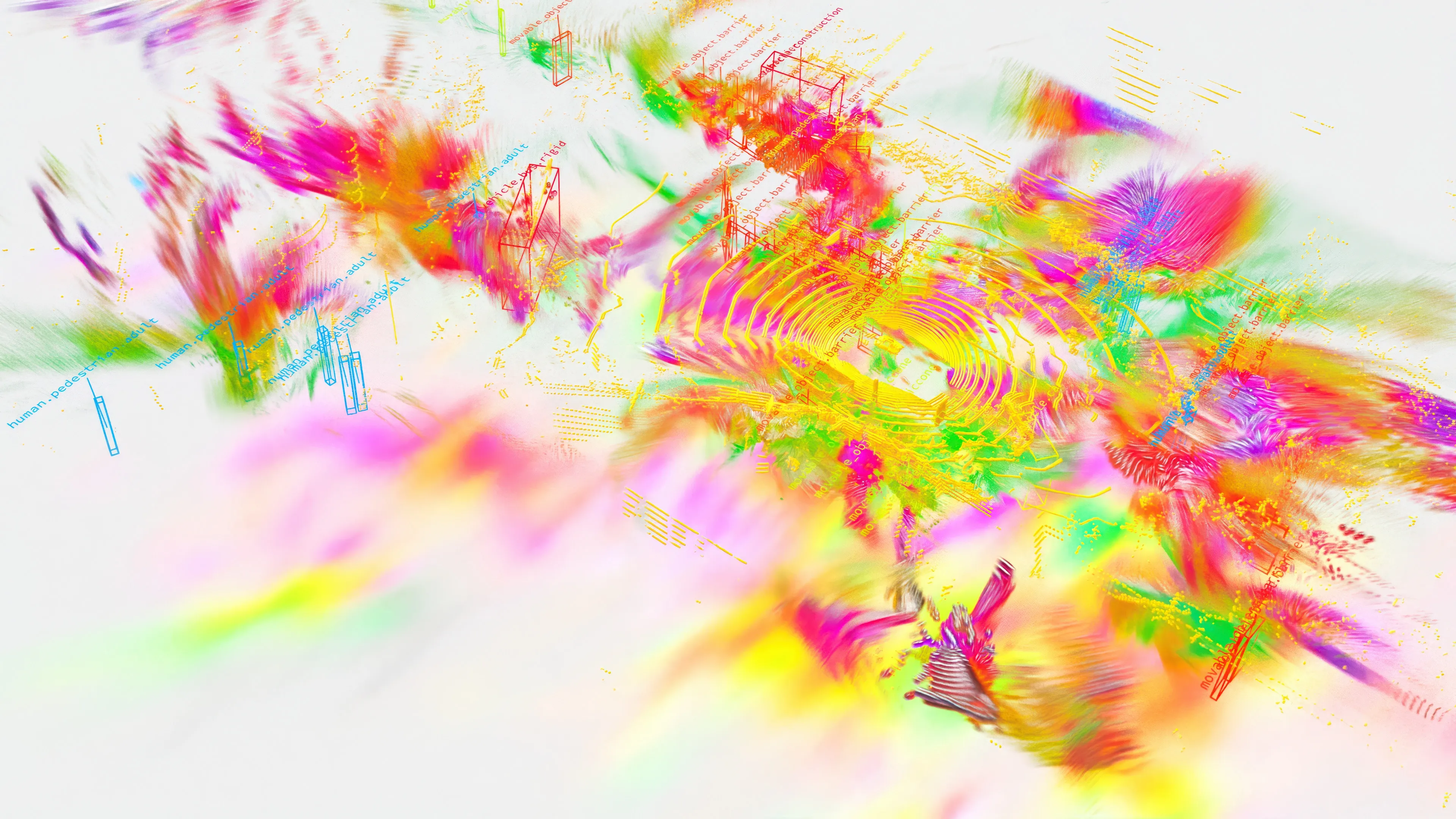
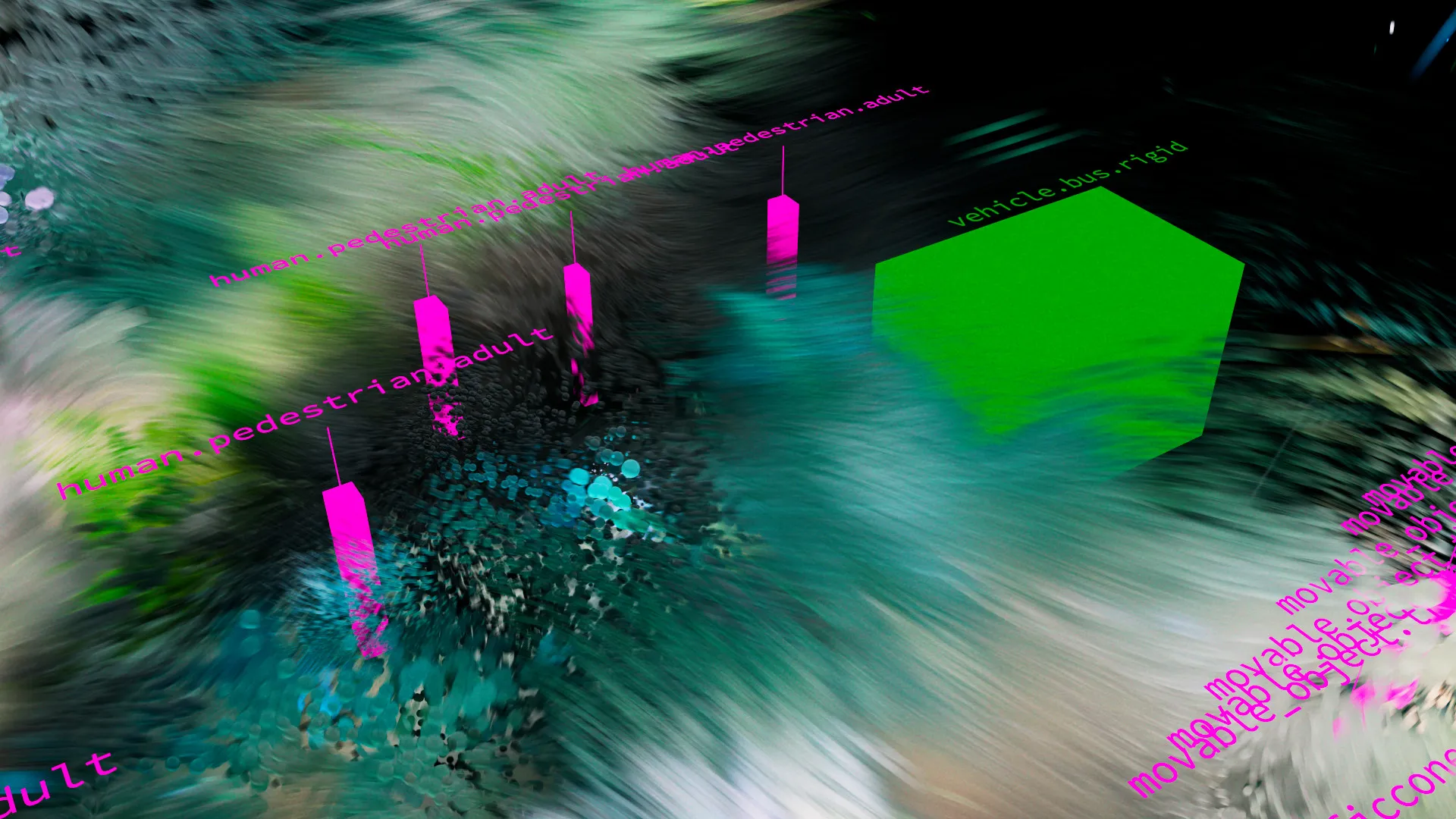
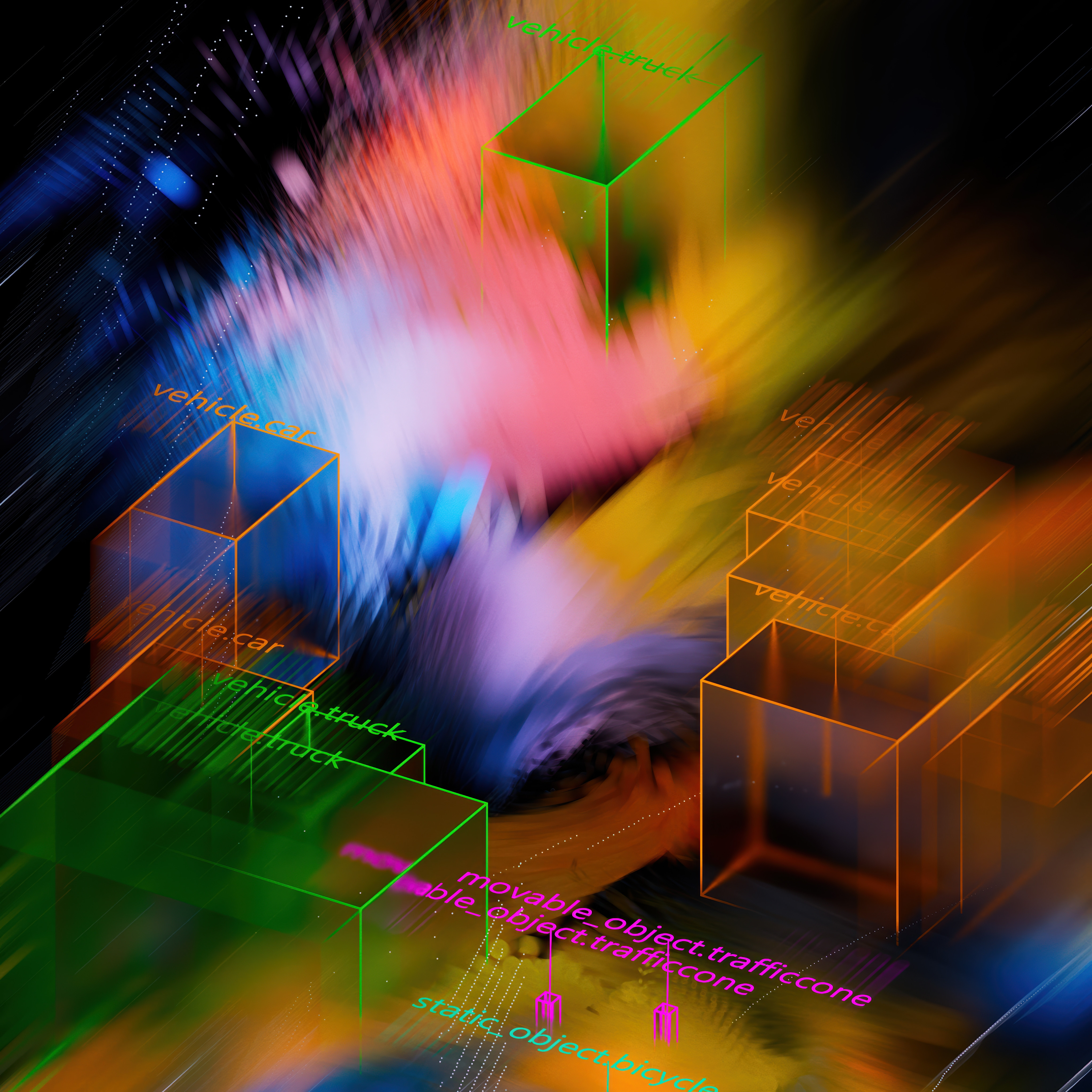
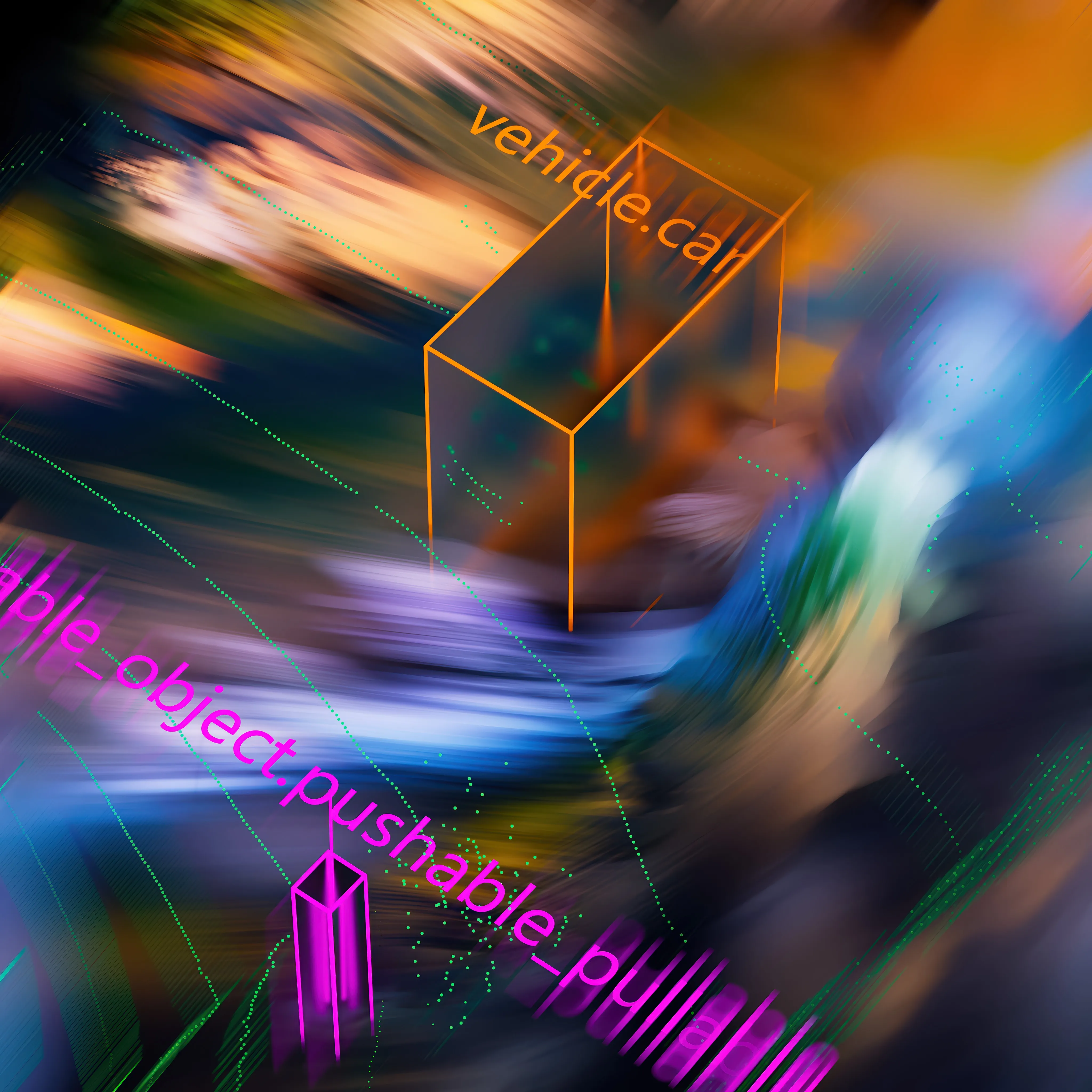
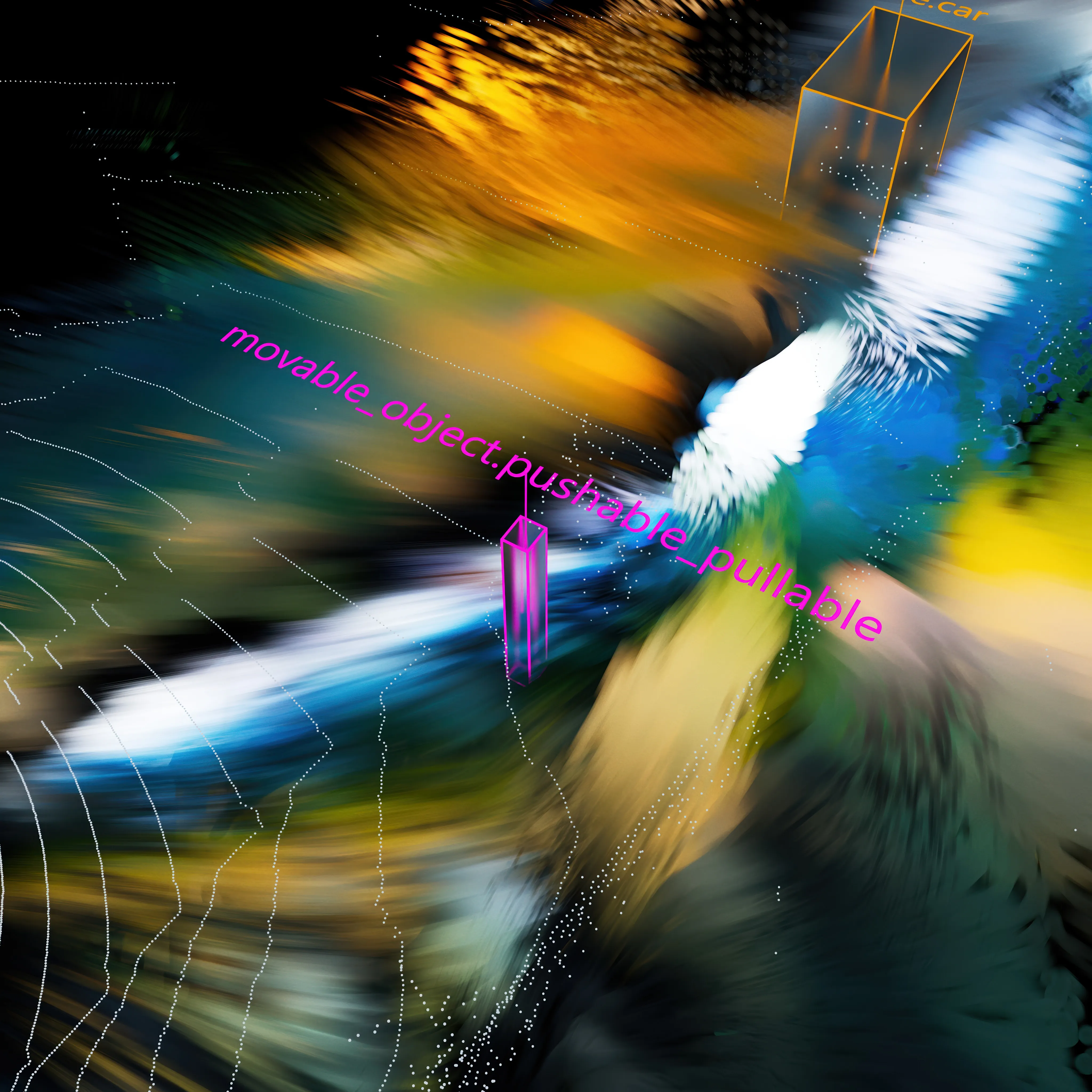
Autonomous Memories takes raw LiDAR datasets from autonomous vehicles and asks what happens when you treat machine perception as an emotional recall.
The result sits somewhere between painting and readout. familiar scenes made strange by the cold precision of a system that sees everything and understands none of it.
Accessing the Data
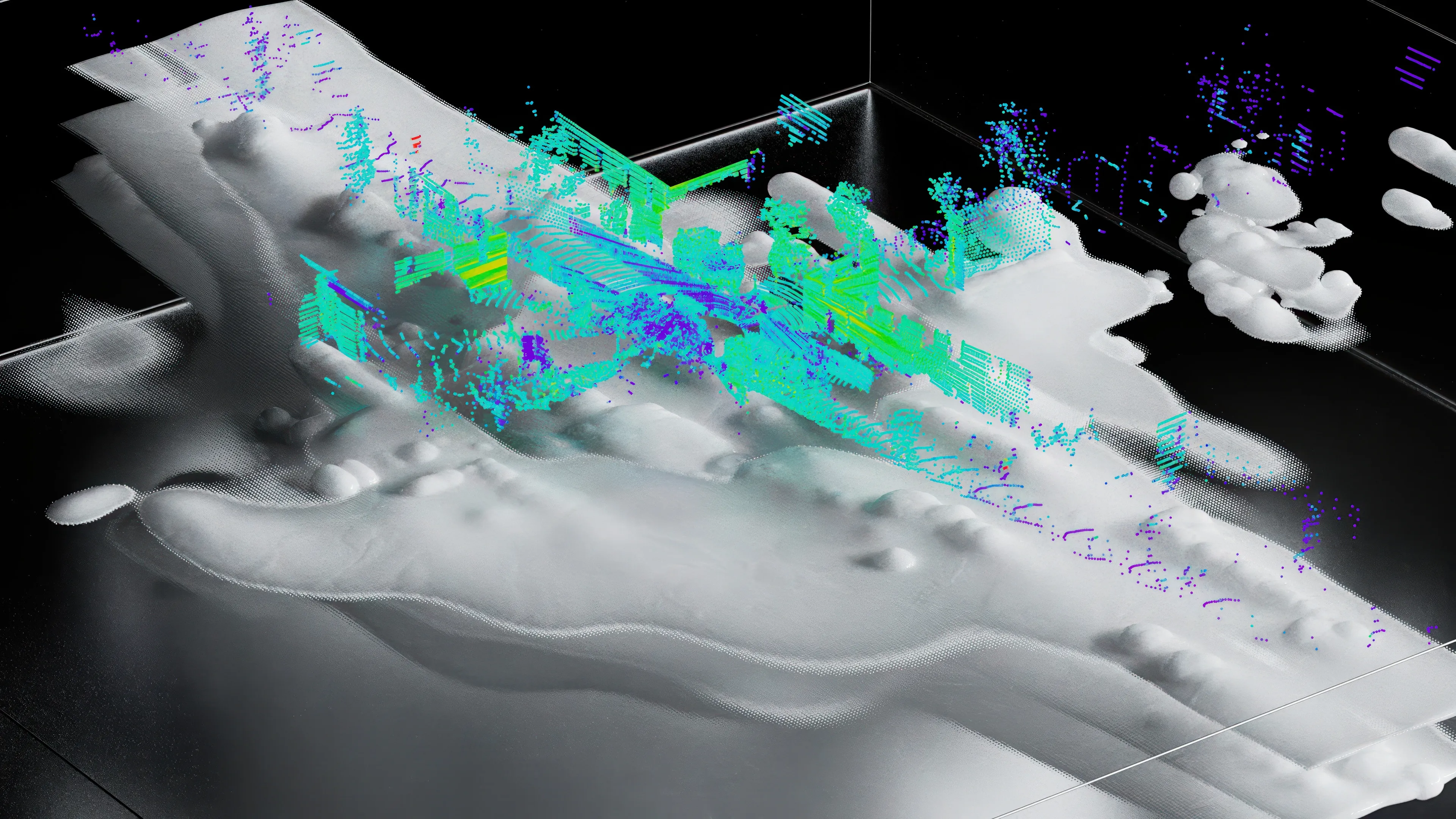
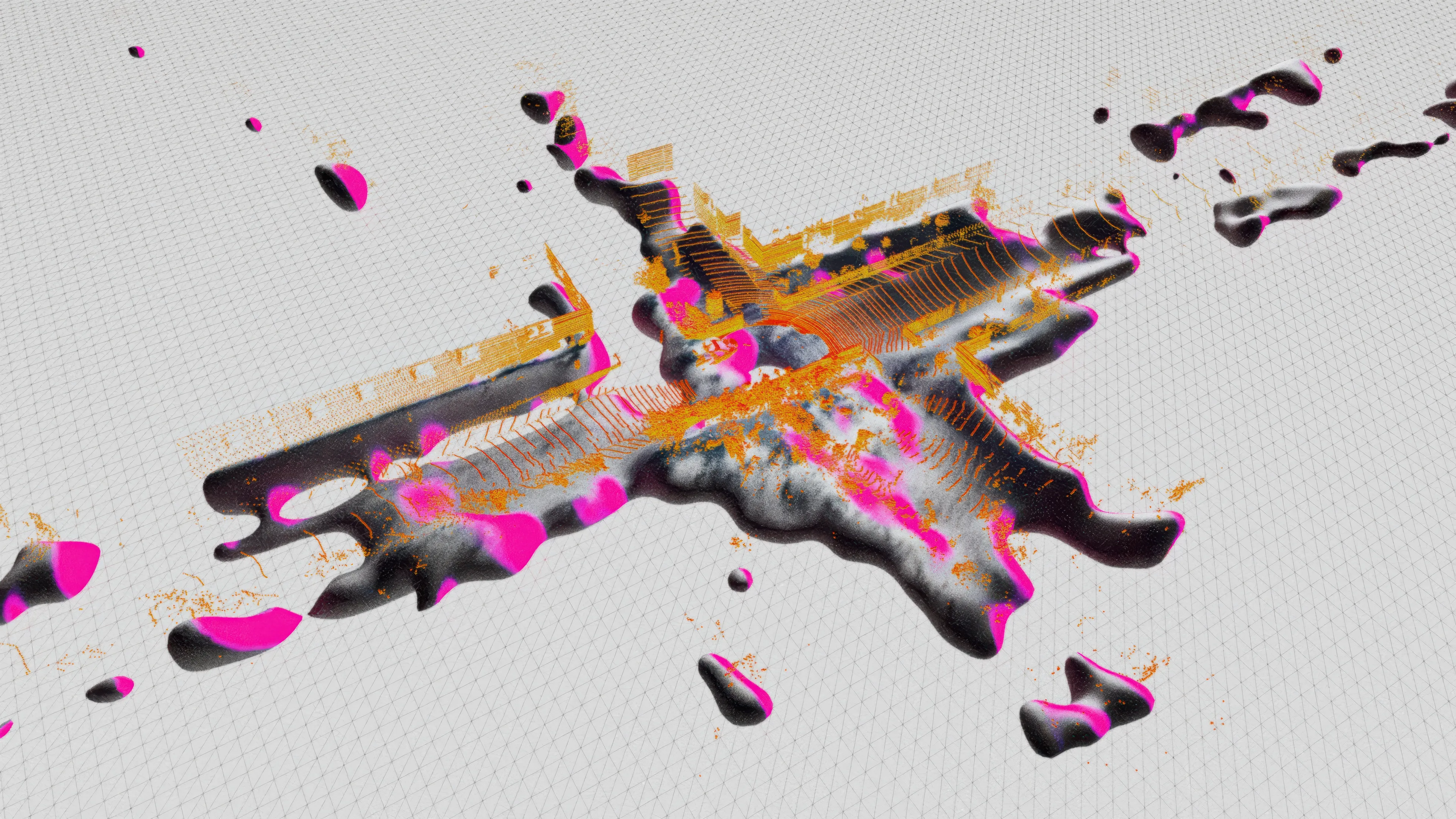
To make the data tangible, we built a custom Python importer to parse raw .bin files from the nuScenes dataset, unlocking LiDAR point clouds, radar returns, camera feeds, and spatial object recognition data simultaneously.
From this we simulated how every point must move toward its nearest detected object, reconstructing the landscape of risk and awareness an autonomous vehicle must continuously navigate.
Not a map of the world as we see it, but as an AV must.






Research & Development